
エイトノット知能化技術 の優位性
多様な実船・実環境データの継続的蓄積
自律航行・操船支援における実船運航データを継続的に蓄積し、船型ごとの挙動差、潮流・風・波など実環境下のデータを保有しています。
船体モデルを「船型」単位で構築
制御に不可欠な船体運動モデルを船型単位で構築し、実船データに基づき検証・調整されたモデルを保有しています。
船体特性まで適応した制御アルゴリズム
風・波・潮流などの外乱を考慮した統合制御で、離着岸・定点保持・航行までを一貫して扱う制御ロジックを保有しています。
EightKnot AI CAPTAIN Module
Control
航行・定点保持・離着岸を可能にする操船制御エンジン
Dynamics
操船制御やシミュレーションに使用する船舶運動モデルエンジン
Localization
船舶に特化した自己位置推定エンジン
Planning
自動回避を行い、目的地までの航路を計画するリアルタイムルート生成エンジン
Perception
他船認識 / 位置・行動推定エンジン
Decision
航行可否・回避判断エンジン
Monitoring
船内ユーザーインターフェース / 遠隔モニタリングエンジン
船舶知能化モジュール
自律航行の運航実績に裏付けられた知能化技術を、舶用機器や船舶への組み込みが可能なモジュールとして提供し、用途やニーズに応じた柔軟な機能実装を実現。
EightKnot AI CAPTAIN Moduleの技術構成
自律航行として成立する最小構成から、用途に応じて拡張可能

知能化モジュールの組み合わせで船舶の自律化を実現
知能化技術の導入事例

自律航行プラットフォームの導入
- 企業名
- 有限会社バンカー・サプライ
- エイトノットのソリューション
『エイトノット AI CAPTAIN System』
導入内容
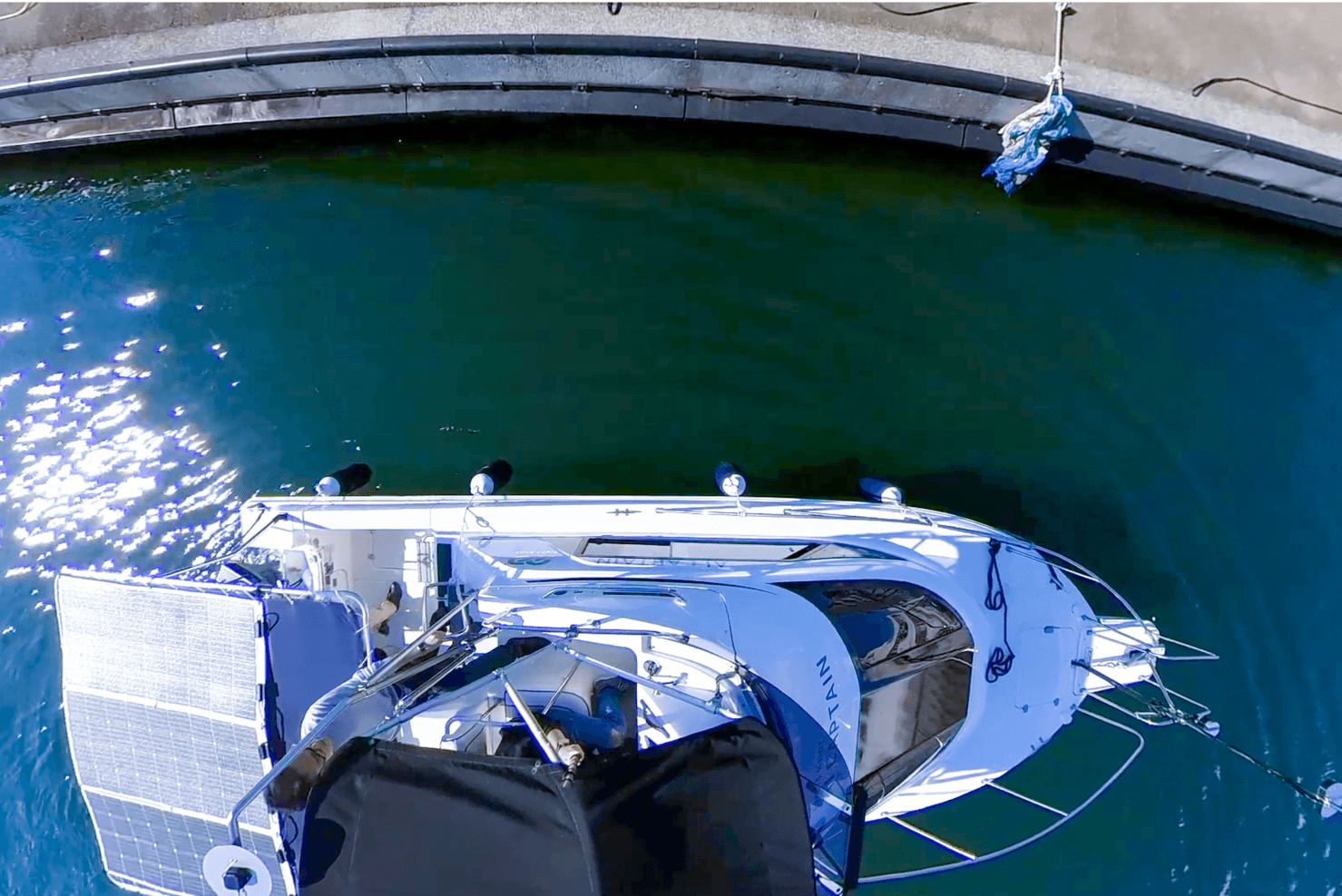
「スマート海上バス ゆき姫」に自律航行プラットフォーム 『エイトノット AI CAPTAIN System』を搭載しています。
深刻な人手不足から事業継続に不安を感じていましたが、自律航行船の実用により乗員負担を軽減。AIが船の位置を明確に示し、乗組員と二重で確認できることで強い安心感が生まれ、長時間運航での疲労や夜間航行の不安を減らすこともできました。
AIによる操船サポートにより新しい人材や女性船員の参入も進みやすくなることから、多様な人材が活躍できる環境につながることも期待しています。
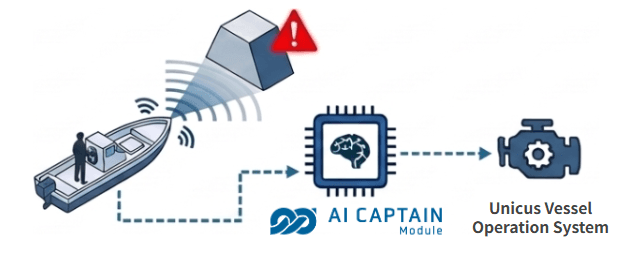
衝突抑制装置
- 企業名
- ユニカス工業株式会社
- エイトノットのソリューション
『エイトノット AI CAPTAIN Module』
- Localization / Perception / Decision / Control
導入内容
知能化製品
衝突抑制装置
共創価値
障害物の自動検出・減速で衝突事故を未然に抑制
従来の操船機能にAIによる二重の安全を付加
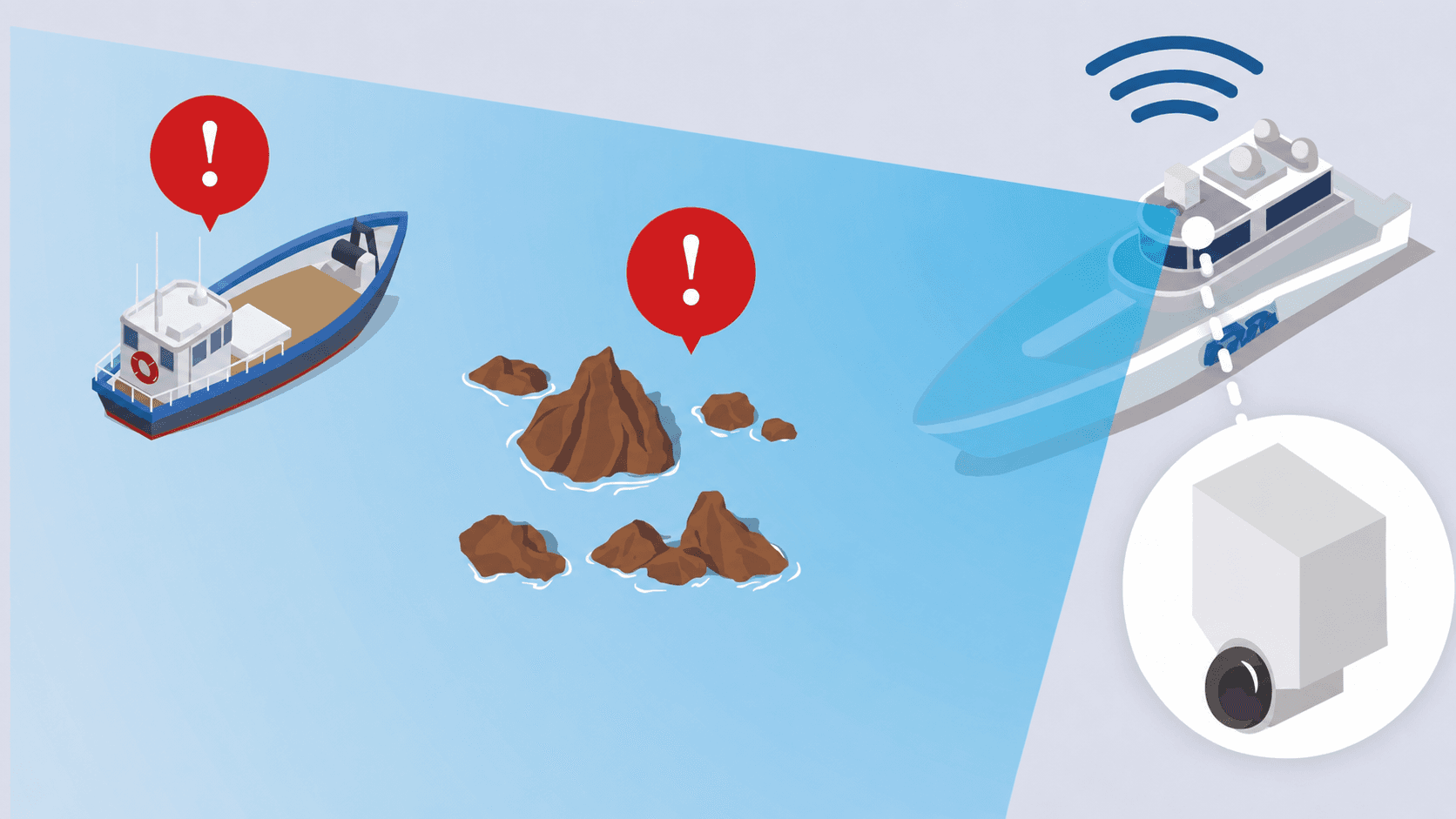
船舶専用映像記録装置 × 自律航行技術
- 企業名
- 株式会社ユピテル
- エイトノットのソリューション
『エイトノット AI CAPTAIN Module』
- Perception
導入内容
知能化製品
船舶専用映像記録装置
共創価値
AI・センサー・映像解析の融合による事故リスクの早期検知
リアルタイム検知と航行安全予測による船舶安全性の向上
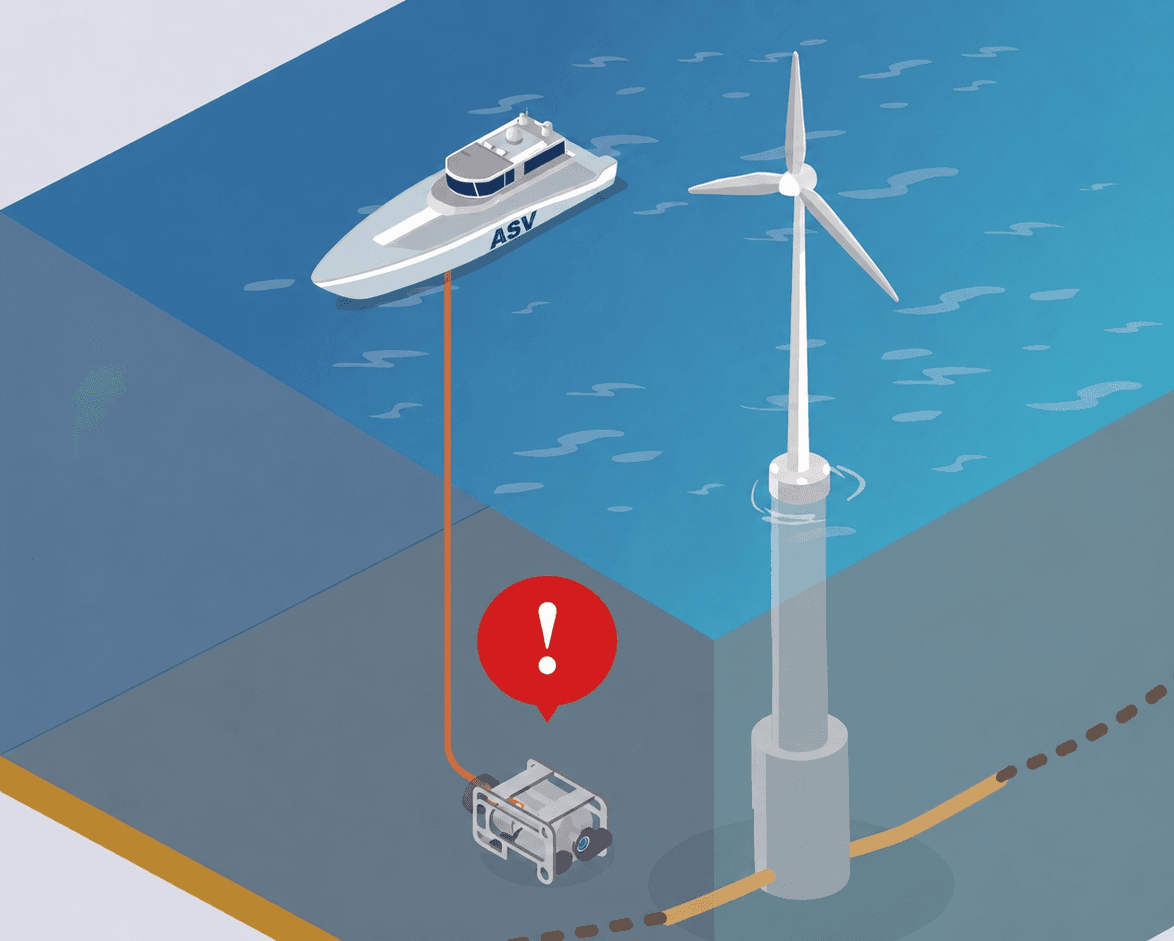
自律航行船(ASV)× 水中ドローン(ROV)
- 企業名
- 株式会社FullDepth
- エイトノットのソリューション
『エイトノット AI CAPTAIN Module』
- Localization / Planning / Control
導入内容
知能化製品
洋上風力向け海底ケーブル点検ソリューション
共創価値
ASV×ROV連携による海底ケーブル点検の省人化・省力化
洋上風力設備点検における安全性・運用効率の向上